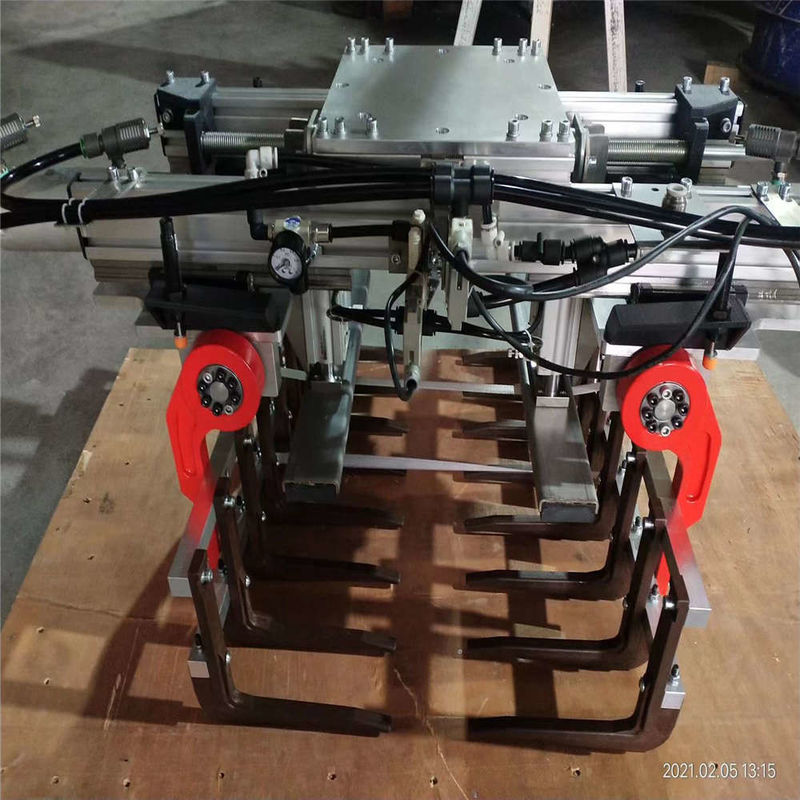
ग्रिपर अन्य पैलेटिंग अनुप्रयोग के लिए परिधीय उपकरण
इनपुट आवश्यकता डेटा संदर्भ
| 1 तालिका 1 |
| पकड़ प्रकार |
बैग |
| वजन और आकार पकड़ो |
50 किलोःL1050mm*W550mm*H250mm |
| पैलेटिंग की गति (बैग/घंटा) |
450 बैग/घंटा |
| पैलेट प्रारूप |
एक बार पकड़ा और एक बार छोड़ा |
| पकड़े जाने का रूप |
दांत पकड़नेवाला |
| मुख्य सामग्री |
एल्यूमीनियम मिश्र धातु और कार्बन स्टील |
| मुख्य वायवीय घटक |
एसएमसी |
| दांत सामग्री |
गोल पट्टी |
| पकड़े जाने वाले दांतों की दूरी |
80 मिमी |
| ग्रिपर का आकार (संदर्भ मूल्य) |
L1057mm*W908mm*H470mm |
| ग्रिपर का वजन (किग्रा) |
40 किलो |
| रोबोट ब्रांड |
प्रयास |
| रोबोट भार (किग्रा) |
ER130-4-2800 |
| |
|
| 2 तालिका 2 |
| पकड़ प्रकार |
कार्टन बॉक्स |
| वजन और आकार पकड़ो |
15 किलोःL300mm*W200mm*H200mm |
| पैलेटिंग की गति (बैग/घंटा) |
450 बॉक्स/घंटा |
| पैलेट प्रारूप |
एक बार पकड़ा और एक बार छोड़ा |
| पकड़े जाने का रूप |
प्लेट पकड़नेवाला |
| मुख्य सामग्री |
एल्यूमीनियम मिश्र धातु और कार्बन स्टील |
| मुख्य वायवीय घटक |
एसएमसी |
| ग्रिपर का आकार (संदर्भ मूल्य) |
L800mm*W180mm*H400mm |
| ग्रिपर का वजन (किग्रा) |
40 किलो |
| रोबोट ब्रांड |
प्रयास |
| रोबोट भार (किग्रा) |
ER180-4-3200 |
| |
|
नोटः यह एक समग्र ग्रिपर बनाने के लिए और वैक्यूम का एक सेट जोड़ने के लिए सिफारिश की है। केवल प्लाईवुड के रूप में, अंतर
बक्से और बक्से के बीच के अंतर को ध्यान में रखा जाना चाहिए।
पैलेट पर बक्से आरक्षित है, वहाँ कई palletizing परतें हैं, जो बक्से की प्रत्येक परत के बीच गारंटी नहीं दी जा सकती है और
बक्से अंतर एक ही है, तो यह केवल एक स्प्लिंट के रूप में एक ग्रिपर के रूप में बनाया जाता है, जो प्रत्येक बॉक्स को पकड़ने में सक्षम नहीं हो सकता है
यह भी ध्यान रखना आवश्यक है कि पैदल चलने के दौरान मशीन कोई सुरक्षा सुरक्षा प्रदान नहीं करती है और हो सकता है
यदि यह एक यौगिक प्रकार में बनाया जाता है, तो यह केवल सक्शन कप का विस्तार करने और बॉक्स को चूसने के लिए आवश्यक है।
बॉक्स को एक निश्चित ऊंचाई तक चूसा जाता है, सक्शन कप को वापस खींच लिया जाता है, और फिर स्प्लिंट को कार्टन पर क्लैंप किया जाता है।
सबसे पहले स्प्लिंट खोलें, सक्शन कप का विस्तार करें, और डिब्बों को ट्रे पर रखें।
कीमत होगी $7000 एफओबी शंघाई. |
उपयोगकर्ता निर्देशः
निर्देश पुस्तिका
1. प्रासंगिक स्थापना और डिबगिंग कर्मियों को पैक करने और अलग करने के लिए कहा जाना चाहिए
2. स्थापना के चरण इस प्रकार हैं:
1) मशीन की प्रोग्रामिंग दिशा के अनुसार मशीन पर ग्रिपर स्थापित करें
2) फिर मशीन पर पकवान स्थापित करें और इसे मजबूती से तय करें
3) आवश्यकतानुसार श्वसन पथ और सर्किट को जोड़ें
4) स्थापना पूरी होने के बाद, ग्रिपर को चालू होने के बाद शिक्षण बॉक्स के साथ सक्रिय किया जाना चाहिए।अन्यथा परिणाम आपके अपने जोखिम पर होंगे) बिना किसी कारण के ग्रिपर को खोलना और बंद नहीं करना चाहिए।
5) शिक्षण बॉक्स का शिक्षण पूरा होने के बाद, लिंक परीक्षण किया जाता है, और अंत में यह सामान्य संचालन में प्रवेश करता है।
6) यदि आप ग्रिपर की चौड़ाई को समायोजित करना चाहते हैं, तो आपको पहले संबंधित शिकंजा या नट्स को ढीला करना होगा, और फिर ग्रिपर की चौड़ाई को समायोजित करने के लिए शिकंजा को घुमाएं
7) फीडर में फ़ीड सामग्री का आकार सीधा रखा जाना चाहिए, अन्यथा, पकड़ने वाली वस्तु को पकड़ लेगी, और गंभीर मामलों में मेजबान क्षतिग्रस्त हो सकता है।
चालू करने की प्रक्रिया
码??抓手调试 चरण
पैलेटिंग ग्रिपर डिबगिंग चरण
1.抓手在安装于机器人臂后,找准在待码机的中心位置,然后找准零点位置 ((不宜过深).ग्रिपर रोबोट बांह पर स्थापित होने के बाद, स्टैंडबाय मशीन की केंद्र स्थिति का पता लगाएं, और फिर शून्य स्थिति (बहुत गहरा नहीं) का पता लगाएं।
2. खोजे जाने के बाद शून्य बिंदु स्थिति, शून्य स्थिति में मैन्युअल तरीके से पकड़ने को खोलें, जांचें कि क्या पकड़ने की प्रक्रिया में आसपास की चीज़ों से टकराने की घटना है. उचित समायोजन करें. जब तक सुरक्षित रूप से खोलने और बंद न हो जाए. शून्य स्थिति का पता लगाने के बाद, शून्य स्थिति में पकड़ने वाले दांतों को मैन्युअल रूप से खोलें,और जाँच करें कि क्या पकड़ने दांत खोलने की प्रक्रिया के दौरान आसपास की वस्तुओं को छूजब तक इसे खोलना और बंद करना सुरक्षित न हो तब तक उचित समायोजन करें।
3. पकड़ने वाले को शून्य स्थान पर रोक देगा, अग्रभाग ट्रांसपोर्टर के ′′प्लेट को समायोजित करेगा, ताकि ट्रांसपोर्टर पर बैग का केंद्र पकड़ने वाले के केंद्र के साथ एक जैसा ही रहना चाहिए।शून्य स्थिति में ग्रिपर बंद करो और सामने कन्वेयर के बफ़ल समायोजित इतना है कि कन्वेयर पर बट के केंद्र ग्रिपर के केंद्र के साथ संगत होना चाहिए.
4. सख्ती से चेक करें वास्तविक पैकेट ट्रांसपोर्ट करने के बाद की स्थिति. गारंटी के साथ तृतीय अनुच्छेद के परिणाम के अनुरूप, लॉक सभी ङप्लेट के शिकंजा. रखना नहीं कर सकते आसानी से परिवर्तन. सख्ती से वे प्रतीक्षा मशीन में ले जाया जाता है के बाद वास्तविक बन्स की स्थिति की जाँच करें. सुनिश्चित करने के लिए एक ही परिणाम के रूप में आइटम में 3,bezels के सभी शिकंजा बंद करोइसे आसानी से बदला नहीं जा सकता।
5.按3,4条调整完后,用校示盒手动校准各位位置 3 और 4 के अनुसार समायोजित करने के बाद, प्रत्येक स्थिति को मैन्युअल रूप से कैलिब्रेट करने के लिए कैलिब्रेशन बॉक्स का उपयोग करें
6. in实抓包子 पूर्व जाँच包子 के सभी आयामों, अनुबंध आवश्यकताओं के अनुरूप बाद में हाथ से प्रारूप में परीक्षण पकड़包子,抓起包子 के बाद जाँच पकड़ हाथ है या नहीं पकड़实包子.根据实际情况对抓手宽度进行适当调整.Check all the dimensions of the buns before grasping the buns.मैन्युअल रूप से ब्रेड पकड़ने की कोशिश करें. बन्स उठाने के बाद, जांचें कि क्या ग्रिपर ने बन्स को पकड़ा है. वास्तविक स्थिति के अनुसार ग्रिपर की चौड़ाई को ठीक से समायोजित करें.
7. उपरोक्त चरणों को पूरा करने के बाद, 10% की गति से एक पूर्ण पैलेट को खाली करें, बिना किसी त्रुटि के 20% की गति से वास्तविक पकड़ में प्रवेश करें, और फिर धीरे-धीरे गति को सही गति तक बढ़ाएं। उपरोक्त चरणों को पूरा करने के बाद, एक पूर्ण पैलेट के लिए 10% गति से रिलैश करें, यह जांचने के बाद कि यह सही है,20% गति पर वास्तविक पकड़ में प्रवेश करें, और फिर धीरे-धीरे गति को बढ़ाएं जब तक कि यह उपयुक्त गति तक नहीं पहुंच जाता।
8.अंत में जाँच करें कि क्या हवा के पाइप और नियंत्रण के तार अच्छी तरह से पकड़े हुए हैं। हवा के पाइप और नियंत्रण के तार को ऑपरेशन के दौरान खराब होने से बचें। अंत में जांचें कि क्या वायुमार्ग और नियंत्रण तार ग्रिपर पर अच्छी तरह से तय हैं। ऑपरेशन के दौरान वायुमार्ग और नियंत्रण तारों को फेंकने से बचें।
9. जांचें कि क्या अचानक गैस काटने के खिलाफ उपकरण स्थापित किया गया है या नहीं. उपरोक्त सभी चरणों को पूरा किया गया है और सामान्य रूप से काम कर सकता है। जांचें कि क्या अचानक गैस काटने के खिलाफ उपकरण स्थापित है। उपरोक्त चरणों को पूरा किया गया है और सामान्य रूप से काम कर सकता है।
संदर्भ मामला
पैकिंग जानकारी.

अनुकूलित आवश्यकताओं का बहुत स्वागत है

 आपका संदेश 20-3,000 अक्षरों के बीच होना चाहिए!
आपका संदेश 20-3,000 अक्षरों के बीच होना चाहिए!